
VOCÊ AINDA NÃO ADICIONOU PRODUTOS.
Modelix + LEGO (Robótica OpenSource)

Modelix utilizando alguns componentes Lego
Aqui apresentamos um artigo com o real significado "Open Source", estamos apresentando uma plataforma que se comporta com objetivos definidos para ser compatível com às diversas analogias do mundo da robótica. Demonstraremos que tudo é possível basta ter criatividade para desenvolver qualquer projeto, utilizando alguns componentes Lego e a dinâmica Modelix. Apresentamos um Robô que tem como objetivo percorrer um trajeto a procura de um objeto e transportá-lo com o uso de uma garra.
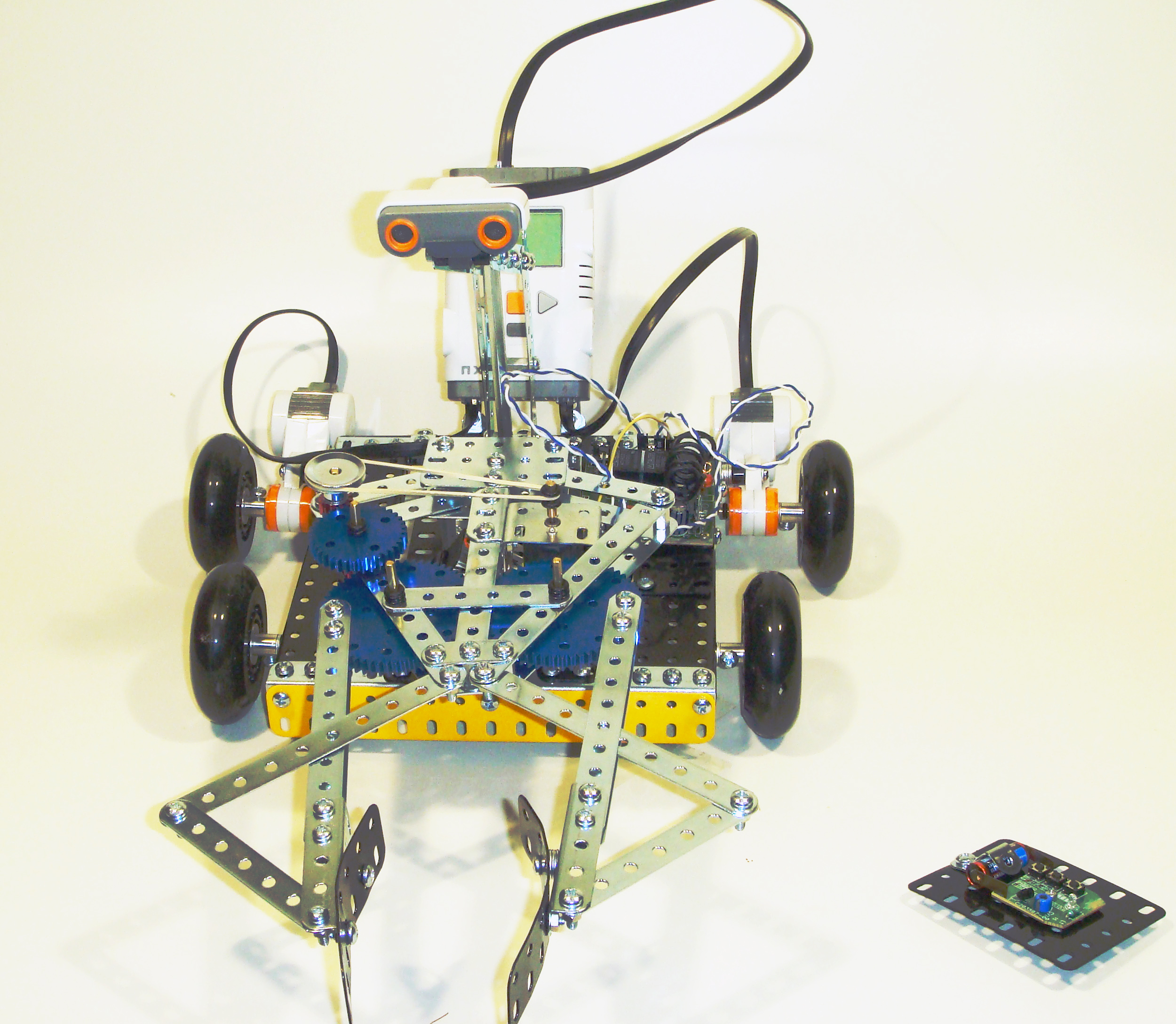
Seu comportamento é baseado pelo Micro controlador NXT (já programado) que transfere um sinal de movimentos aos servo motores para percorrer uma rota, onde se encontra um objeto (compatível à garra de captação), que em sua parte superior esta instalado um sensor de distância (entender a lógica deste sensor), que reconhece a distância limite e ao chegar próximo deste objeto interrompe as atuações dos servos, parando assim seus comandos aguardando a função da garra ser concluída para retornar o deslocamento. Contudo é utilizada a garra autônoma ao sistema do NXT, pois ela é direcionada a outro micro controlador o MC 21 (entender o MC 21) que comanda a garra por Rádio Freqüência em abri-la e fechá-la, criando uma equação de diferentes sistemas para a funcionalidade do robô.
Neste projeto apresentado conseguimos unificar duas plataformas para demonstrar e enfatizar que o "open source" tem como caráter apresentar um leque de idéias e conceitos para o despertar a criatividade e ter em mente que sua idéia pode ser feita de qualquer maneira. Foi utilizado para a sua construção do MIX MXL:
Modelix: peças de dinâmicas, engrenagens, MC 21, um motor de giro DC e componentes elétricos.
Lego: dois servos motores, Micro Controlador NXT e sensor de distância.
Conheça mais os Kits de Robótica na WSKITS

wSkiTS.com.br © 2025